On donne la documentation technique du robot Moway, accessible dans le menu ci-contre.
Dans le sommaire du dossier technique, cliquer sur "3.2 Système de motorisation".
Question 1 : Expliquer succinctement comment le Moway se déplace en ligne droite puis en virage.
Question 2 : Expliquer succinctement comment le Moway détermine la distance parcourue.
Dans le sommaire du dossier technique, cliquer sur "3.3 Groupe de capteur et indicateurs" :
Question 3 : Lister les capteurs (pas les indicateurs !) du robot moway.
Question 4 : Compléter le tableau de votre document réponse, permettant de décrire les capteurs du moway.
Création d'un algorithme de programmation :
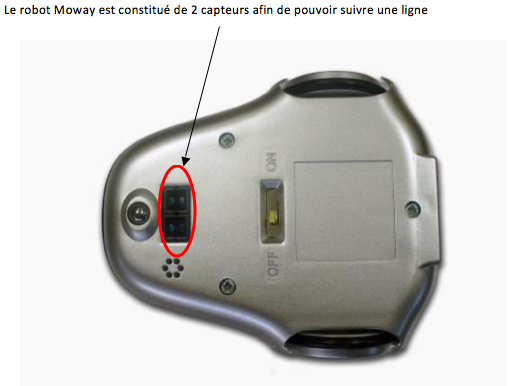
L’objectif est de réaliser un programme pour suivre la ligne du circuit.
Question 5 : Rechercher sur Internet la définition du mot "algorithme".
Question 6 : Si l'on pose le milieu du robot au bord de la ligne noire, que voient les capteurs dans cette position ?
Question 7 : Quelle doit être l’action à effectuer dans cette position afin de suivre la ligne ?
Question 8 : Si le robot avance tout droit et que la ligne noire tourne à droite, que voient les capteurs ?
Question 9 : Que doit-on faire pour que le robot se mette au bord de la ligne ?
Question 10 : Si le robot avance tout droit et que la ligne noire tourne à gauche, que voient les capteurs ?
Question 11 : Que doit-on faire pour que le robot se mette au bord de la ligne ?
Question 12 : Représentez sous forme de schéma (blocs actions "aller tout droit", "aller à droite",... et flèches) les différentes étapes vues précédemment.