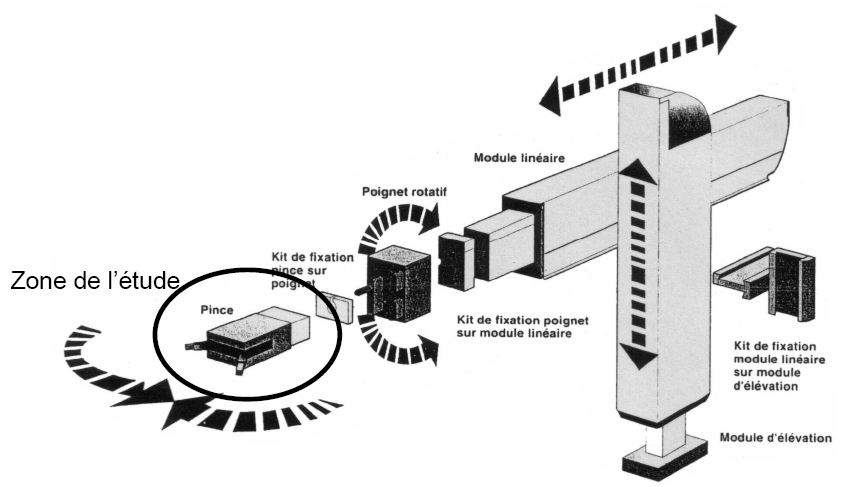
Les manipulateurs sont constitués généralement à partir dun agencement déléments modulaires. La pince Parker est un module de préhension qui permet de saisir, à partir dune source dair comprimé, une pièce entre les deux doigts.
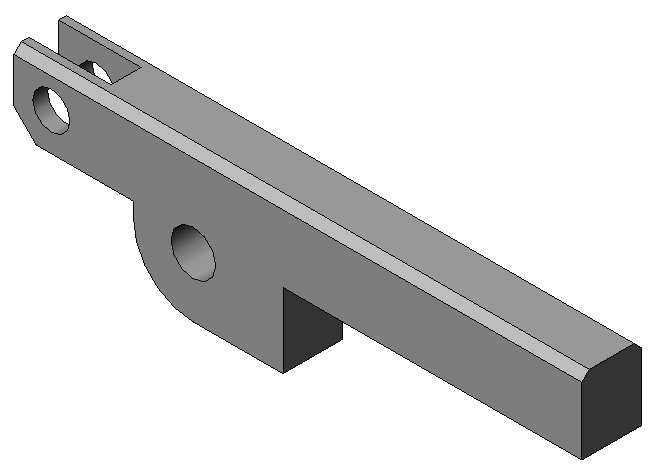
La pièce que l'on va dessiner est un doigt d'une pince de préhension Parker.